
課題番号:AH1002
代表者:田中 智(宇宙科学研究所)
自然現象を観測するためには、観測場所を決定し、そこに観測機器の設置、そしてデータ収集を行う「システム」が必要です。観測データなしに自然現象を解明、実証することは不可能です。これは地球だけにとどまらず宇宙、月、惑星でも同じで、そのために探査機を送り込んで観測を行います。
南極は広大な面積に加え、温度、環境、条件など観測システムを設置するには障害、危険が数多く存在しています。南極での科学を前進させるには、いかに効率的にまた経済的に観測システムを展開するかが非常に重要な課題の一つと言えるでしょう。
私達は、これまでの月惑星探査技術の開発として「ペネトレータ」とばれる投下貫入型の観測システムを長年開発してきました。
これは探査機が月惑星を周回している軌道から分離させ、ジェット機に相当する速度で地面に貫入させる観測装置です。この技術を南極に応用することで南極域において場所を選ばずそして経済的に観測システムを設置する技術を開発しよういうのが本研究の目的です。つまり観測「できる場所」ではなく観測「したい場所(必要な場所)」での観測を実現するための技術開発が本課題の目的です。
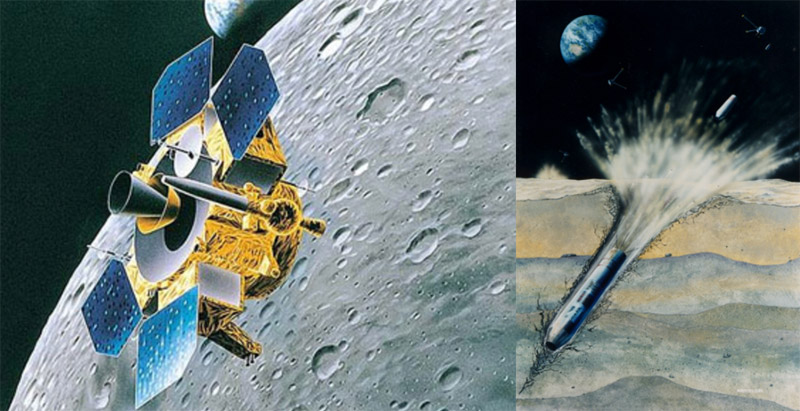
月探査計画LUNAR―A(左)とペネトレータ(右)(想像図)。このミッションで開発した技術をベースにして南極用観測プローブを開発します。
本課題における研究の開発、実施する内容は次に示すように大きく3つに分けられます:
これまでに月惑星用や地球の火山用に開発をしてきました。南極では気象条件や地理的条件から通常行う観測装置とは異なる設計、工夫が必要になります。電源システムや電子回路の耐温度環境性能、通信システムの性能など一つ一つの観測機に含まれる機能、性能を南極での観測に適用させるための設計、開発を行います。現時点で搭載を考えているセンサーは地震計、GPS、インフラサウンドセンサーで、これらの観測に対応した電子回路やデータ収集および通信のためのソフトウェアも開発します。開発をした観測装置は実際に南極域での動作性能を評価して改良を重ねることで実用使える装置を実現します。
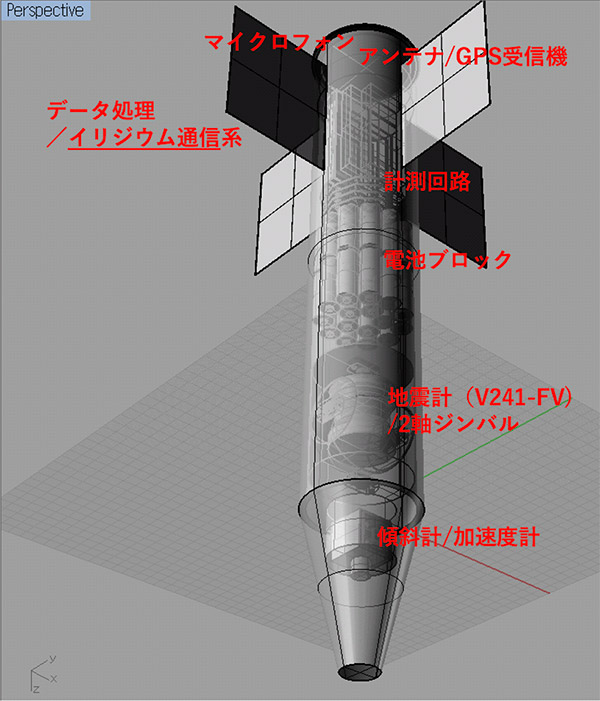
南極用に開発を検討しているペネトレータペネトレータ構想図。地震計、インフラサウンド(マイクロフォン)、GPSを搭載し、衛星通信でデータを送ります。
「ペネトレータ」は衝撃に対して頑丈に作るので単純に上空から投下すればよいのですが、南極には露出した地面、氷床、そして雪面など多様な表面状態が想定されるので、それに応じた投下技術が求められます。投下条件(高度)や気象条件、開発を予定している空中でペネトレータが減速できる装置を使って適切な条件で貫入する技術を見出します。初期段階ではドローンを用いた試験で基礎的な実験を行い、また有人ヘリコプタからも投下できるようにします。最終段階では有翼の無人航空機(UAV:Unmanned Aerial Vehicle)を用い、100km以上離れた場所にも設置できる技術を確立することを目標にしています。

ペネトレータを搭載、投下可能なドローン(左)および無人航空機(右)。これらの無人搬技術を用いて完全無人での観測システム設置を目標にします。
上記1)、2)で確立した技術を、実用にむけた観測を実現します。現時点では、危険性が高いために立ち入ることが困難な「白瀬氷河」上を観測点として考えています。この地域は氷河の流動に伴って地震動やインフラサウンド(音波)が発生し、それを的確に捉えることによって氷河の状態や運動を精密に解明できることが期待されています。通常であれば、氷河をとりかこむ周辺地域に観測システムを設置しますが、このペネトレータでは氷河本体に設置し、氷河自体が流動するときの地震動、インフラサウンド、そして測地(GPS)観測を実施する予定です。投下システムとしては、上空まで有人ヘリコプタで搬送することに加え、無人航空機を使用して基地から長距離(100km以上)搬送して自動投下することを目標にします。